����LabVIEW��PXIƽ̨��6-DOF���������˿���ϵͳ�Ŀ���
Study on the Control System of the 6-DOF Parallel Robot Based on LabVIEW and PXI Development Platform
���ߣ��Ž���
ָ����ʦ���߷� ���ֳ�
�Ϻ���ͨ��ѧ��е�붯������ѧԺ
Ӧ�����������˶�����
��ս��Ӧ�ó����NIϵ�в�Ʒ���ٹ���һ�������ơ�������Խ���˻������ѺõĿ���ʽ�����ɶȲ�������������ϵͳ����������ѧ�����������ʵ�����塣
Ӧ�÷�����
��6-PPPS�����ɶȲ���������Ϊ������PXI-1042��ǶPXI-8186������Ϊ���ģ�����PXI-7356�����˶����ƿ���UMI-7774�ӿڰ�����6���ŷ���������ö�����ƿ�������������LabVIEW 8.0ʵ�ֵ����ȫͬ�������������˵Ķ���Э���켣���ơ��켣����ѡ������ʾ�ȹؼ�����������PXI-6511�������뿨ʵ�ֲ�����ť��״ָ̬ʾ�ȿ��������ƣ�������PID��������RTģ���ǿ����ʵ�ֿ��ٿ��������������ϲ������û��¼�������֪ͨ����м�����LabVIEW�ĸ���̼���������˸��û������ģ��֮���ʵʱ�л������ֱ�����Ӧ����ʵ�ֲ�ͬģ��֮�����Ϣ���ݺ�����VI��̬���뼼����ʵ����VI�ļ������úͶ����Ķ�̬���뼰�������ã��������LabVIEWǿ����ⲿ�ӿ�
������ʵ���˶�̬���ӿ⣨DLL����Windows API�ĵ��ã���Ƕ����Matlab�����������˶�ѧģ�ͣ�ʹ��������ǿ��Ĺ��ܣ�Ҳʹ�ø��ӵļ����Ϊ��ݡ�
ʹ�õIJ�Ʒ��
- PXI-1042 ���䡢
- PXI-8186 ��������
- PXI-7356 �˶����ƿ���
- UMI-7774 ͨ���˶����ƽӿڡ�
- PXI-6511 ��ҵ����I/0����
- LabVIEW 8.0��
- LabVIEW RT(ʵʱģ��)��
- Control Design and Simulation Bundle
- Labview Control Design Toolkit
- Labview System Identification Toolkit
- Labview Simulation Interface
- Toolkit
- Labview Simulation Module
- Motion Assistant
���ܣ�
��������������նȴ�������ǿ�����С�����ȸߡ����ظ��ɱ�С���������ܺõ��ŵ㣬�������ǵ�ǰ�������о�������ȵ㣬���������߳�ʵ���ұ���ҵ�����Ͽɡ��ȶ������١�ȷ�Ŀ���ʽ���ֿ���ϵͳ����Լ���������˷�
չ��ƿ��֮һ������ʵʱ�Խ�ǿ�Ķ����˶����ƿ��������Ƶ���������ƽ̨Ϊ�似���ؼ���Ӧ��NI��˾��һϵ����Ӳ����Ʒ�����ܹ�ʵ�ֻ����˵ľ�ȷ�����˶����ƣ����ҽ�Լ�˿������ڡ�������ϵͳ�ɱ�������ά���������ر�����������������Ӧ�ã�ʹ��ϵͳ�ܹ���һ���dz��Ѻõ��˻��������档��Щ�ŵ�Ϊ�����ɶȲ��������������г��ṩ�˱�֤��
�������У���LabVIEWΪ����ƽ̨����Ƕ������˶����ƿ���PXI-7356����PXI����ƽ̨ΪӲ��������������ø�������ģ����߰������ٿ�����������ά�˶���6-DOF��Degree of Freedom�����������˿���ϵͳ���ڱ�����ϵͳ�Ŀ��������ƹ�����ʵ���˶���ͬ��������Э���켣���ơ��켣����ʵʱ��ʾ��ѡ�����Ķ�̬�������ع�����Ϣ�ĵ����빲���ȹ��ܡ�ʵ����֤����Ӧ��NI��˾ϵ�в�Ʒ�����ܹ����ٵؿ��������������˵Ŀ���ϵͳ�����ϵͳ���Լ۱ȣ������ܵõ��Ƚ�������ϵͳ���ԣ��磺25KHz��25.6MHz�ı����������ź��˲���Χʹ��ϵͳ�ܹ���ǿ����ŵĹ�ҵ�ֳ����ȶ�������6��PID�������ڿ��Դﵽ250��sʹ��ʵʱ��ԶԶ����һ����ƿ���ϵͳ1ms��Ҫ����������Э���˶����ĩ��ִ������̬���ɴ�1��m������ϵͳ��ȷ�����ԡ�
�������
��������������Խ�����������߳�ʵ���ң����빤ҵ������ǽ�Ϊ��Ϥ���ճ������С�����1962��Gough and Whitehall�ͰѲ�����������Ϊ��̥�������Ͻ���ʮ���У����������˱����ڷ�����ģ���������������ˡ������������Լ����������Զ���е����Ӿٲ�ʤ�١�Ȼ�������ಢ�������˴����ڿ������ڳ���ϵͳ������ά�����������ѡ���۸߰��Լ�ϵͳ���Բ����Ƶ�ȱ�㣬��Ҳ����Լ����������ȫ�������г���ƿ��������ڽ϶̵�ʱ���ڿ�����ϵͳ���Ժá��ɱ��͡�������ȫ�������ѺõĶ����ɶȲ��������˿���ϵͳ��һ����ս�ԵĹ�����
������6-PPPS����������Ϊ���ƶ�����NI��˾��ϵ����Ӳ����ƷΪ���������й�����Ȼ����No. 30770538����֧�֣����ٿ����˴˲��������˵Ŀ���ʽ���ֿ���ϵͳ��
ϵͳ��������
���������о��IJ��������˵������������߾��ȵ��ŷ���������������е���ÿһ���϶�����ǰ��λ������λ��ԭ���������أ���18��I/O�������������Ҫ������λ�÷���Ϊ�����Ĺ켣�滮��ʹ�����˵�ĩ��ִ������һ���Ĺ켣ȷ����Ԥ��λ�ã�������Ԥ�ȹ滮�Ĺ켣���й�������ˣ����������˵Ĺ켣�滮�ͷ���������Ҫһ������ǿ��ļ��������м���ʹ洢��������Щ�洢������ʵʱ�ش��͵���Ϊ��λ���Ŀ��ƿ����������ϣ��Բ���������������ĵ������ѹ�����ǵ�ϵͳ��Ҫ���������ݴ��ݡ���ȷͬ���Լ�I/O�ź��������ص㣬��������ѡ����PXI����ƽ̨��������ΪPXI��������ҵ�ڽϸߵ����ߴ����ͽϵ͵Ĵ����ӳ٣������ṩ��DC��6.6 GHz RF�ĸ���ģ�黯��I/O��Ϊ����Ӧ��ϵͳ��һ�������ͺ���ģ���Ƕ�룬����ѡ���˸����ܵ�8�ۻ��䡣�������������Ƕ2.2GHz Intel ����4��������PXI-8186����������˹켣�滮��������ݷ����Ŀ����ԡ�PXI-6511��ҵ����I/O�ӿڰ���Ϊ��Χģ���ṩ���64·�ĸ����������롣���ڻ����˿���ϵͳ����Ӳ��������ƺ�ѡ�ͣ����ǽ��ֱ���������һ���ܡ�����ϵͳӲ��֮��Ĺ�ϵ��ͼ1.

ͼ1.6-DOF���������˿���ϵͳ�ĸ�����֮��Ĺ�ϵ
����ϵͳӲ�����
���ڱ�������������ΪȾɫ���и�װ��ϵͳ�ĺ궯��ϵͳ���縺�ų�Ⱦɫ������и�����ľ��������иߵĶ�λ���Ⱥʹ�Ĺ����ռ�Ҫ�������������һ6-PPPS����Ŀռ������ɶȲ����������������߾����ŷ��������ʵ�ֿռ���ά�˶���X��Y��Z����������ƶ�����X��Y��Z���������ת��������Ϊĩ��ƽ̨Ҫ�ﵽ�����Ⱥ����������Э�����ƣ���������ѡ����NI��˾����Խ��PXI-7356�����˶����ƿ����˶����˶����ƿ��Ļ���ϵ㼼����Ч������˻����ٶȣ�����һ���λ�öϵ��ܹ���2kHz�����ʼ��㴥���㣬���ڵȾ�ֲ������ܹ��Ըߴ�4MHz�����ʼ��㣻�˿�������PID�������ڿ��Դﵽ62.5��s,8��PID�������ڿ��Դﵽ250��s��ʵʱ��ԶԶ����һ���������1ms��Ҫ����˸ߵļ���Ч����Ӧ�˱�ϵͳ�Ŀ�����Ӧ�����ԡ�PXI-7356�����˶����ƿ��Ķ���ͬ��ʱ��С��һ���������ڣ���λ�þ��Ƚϸߣ�λ�÷���ʱλ������������һ���������̼�����quadrature count����ģ��������ʱӦ�������õ�8·16λģ��������ɼ����ܣ�����������ģ��ת���ķֱ��ʣ�ʹ��λ��������һ���ϵ���Чλ(LSB)����˸ߵľ���Ϊϵͳ�߾��ȵ�Ҫ���ṩ�˺ܺõı��ϡ����⣬PXI-7356�����˶����ƿ������İ�ȫ����S���ߵ��ڹ��ܡ�˫PID���ƻ��Լ�����֮��ĵ��ӳ�������ܹ�Ϊϵͳ�ṩ�ɿ����ȶ��ԡ�PXI-7356�����˶����ƿ����������˶����ƽӿ�UMI-7774�˿ڰ�����������ƹ�̬�̵����Ͷ�ȡ���ֱ�/��������64λ����I/O��ʹ��ϵͳ������18·��λ��12·ʹ�ܼ��ڶ�ı������źŶ�ȡ�������Ϊ�����ݡ��������Ͽ��ǣ�������ΪNI��˾��PXI-7356�����˶����ƿ���������ģ��ʽ�ʺϱ�ϵͳ��Ҫ��ѡ�á�
����ϵͳ�������
����ϵͳ�ĸ�����ʹ��������ƵĹ����б�����к�����Ч�IJ����ģ�黮�֡���Ͽ���ϵͳӲ������Ҫ���ֵĹ��ܣ�����������ΪӦ�������㡢��������������������㣬ÿ����ݹ���Ҫ���ַ�Ϊ���ɹ���ģ�顣��ͼ2.
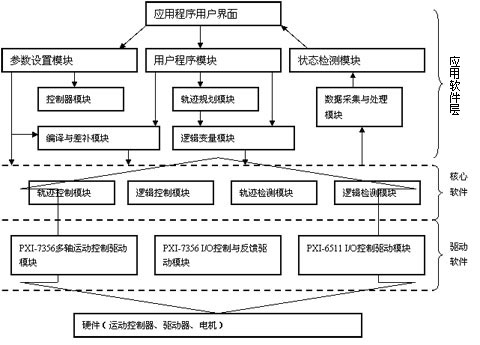
ͼ2. �����ṹ����Ϣ����
Ӧ�������㣺���ǵ�ϵͳ������������Ҫ����һЩ���������Ƶ����բ��һЩ�ӿ����ı�������ѹ���մɵ����в�����һЩָʾ���������������źš�һЩ�켣������ʵʱ��ظ����ֵ���������Լ�������֮����л��ȹ��ܣ�����ѡ���˽���������������������ֵ��LabVIEWͼ�λ�������ԣ���д���Ѻá����㡢�����˻����档����������������/�ӽṹ�ı�̷�ʽ����Ҫ��Ϊ�˽�������ͬƵ�ʵ�ѭ����ѭ��֮�����Ϣ������������Ƕ���˲��������˵ķ���ģ�ͼ������㷨������ȫ�ֱ������ֲ�����������������ʵ�ָ�����ģ��֮�估ģ���ڲ�����Ϣ��������������û��¼�������֪ͨ����м���ʵ�ָ�����֮����л���Ϊ�˱�����������ѭ��ͬʱ����һ������֮��ľ������⣬������ͬ����������Ϊ����Ƚϴ���Ҫ��ӳ����Ϣ�࣬����ڳ���Ĺ����ϣ�����Ҳ���������LabVIEW�ĸ���̼��ɣ���Ϊ�˽�ʡ�ڴ�������������ܼ�ǰ��壬���Dz����˶�̬VI���Ƽ���������ʵ������VI�ļ��ü���������ʵ���˶���������ƵĶ�̬����ͽ������á�
���������㣺��������˵Ĺ켣������I/O�����Ƶij��ϣ������㡢�������С�����������켣����ѡ��ϵͳ�Լ�ȡ��ò�����һ���渺����ɻ����˸��ؽ���������ľ�ȷͬ���˶����ƣ�ʵ��ĩ��ִ�����ڲ����ռ��еľ�ȷ�켣����һ���棬�ò���������Ҫ���һ��ͨ��I/O������������ƣ�ʵ�ֶԻ����˶��Ĺ��̿����Լ�����Χ�豸��Э�����Ƶȣ�����Ӧ���ӵĿ���������Ҫ��
���������㣺����������ʵ�ֵ���������˶����ơ�D/Aת����Ӳ��I/O���Ƶĺ������ϣ���������
����Ķ�:
- ...2015/01/29 14:35�����ڣ̣��֣ɣţ� ����������ϵͳ���о�
- ...2013/12/03 14:27������LK����ˮ������PLCϵͳ
- ...2013/01/04 16:30�����ڣ̣��֣ɣţ� �ģˣףУ�������Э�鴮��ͨ�ŵ�ʵ��
- ...2012/08/28 14:37������������Ƶ�� ����LabVIEW��NI USRP������Ƶ/ͨ���������о�
- ...2012/08/21 10:43������LabVIEW������Ӱ��ʾϵͳ
- ...2012/05/17 09:44������LM PLC���Ƶ�̫�����Զ�����ϵͳ
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������