����LabVIEW �� PXI��������SPring-8����ͬ�����ٷ����豸�����������ϵͳ
��λ��Ȧֱ�����ִų�����ϵͳ
��ͨ��ʹ��LabVIEWͼ�λ��ı�����ڶຯ�������ǿ��Ժ����ش��������������Ӧ�Ŀ��Ƴ���
�C ���� �� ��, �|����ѧ�����о��� ܉�����������о�ʩ�O
��ս��
����һ��ϵͳ������ִ��ֱ��(DC)���ִų�������ʱ�䡣
���������
ʹ��NI LabVIEW ʵʱģ���� NI PXIӲ��������һ����λ��Ȧֱ��(DC)���ִų�����ϵͳ��
����:
���� �� �� - �|����ѧ�����о��� ܉�����������о�ʩ�O
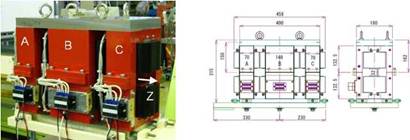
������ѧ���о���Ա�ڴ���ͬ�����ٷ����豸SPring-8 (ͼ1)�Ļ����Ͻ����˸�ǿ�ȵ���X���߷����ߣ����ڼ�˲��Ͽ�ѧ�о���

ͼ 1. ��ǿ����X���߷����ߣ����ڲ��Ͽ�ѧ�о�
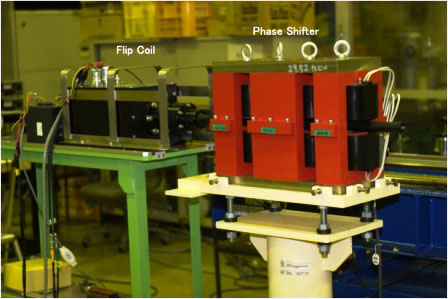
�����������������а�װ��һ���������Ʋ�������ת��ͬ�����ٷ���ļ���(ͼ 2)����������һ��ͨ���ظ������������������������ǿ��ͬ�����ٷ����װ�á�
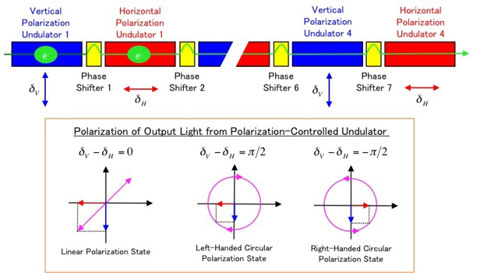
ͼ 2. �������Ʋ�������ԭ��
�������Ʋ��������ĸ�����ˮƽ�����IJ��������ĸ�������ֱ�����IJ�������ɡ����������������������������������������������鼫�Ե��������˼���Ҳ�ǽ���ġ����������ܵ�����������������Ա仯�Ĵų�����������ͨ������ų��������������С������ˮƽ�봹ֱ����֮�������λ�ͨ��������λ��Լ�����ˮƽ�봹ֱ�������Ϳ��Բ�����������/��Բ������
Ϊ��ʹ�ü������Ʋ�����������������ͬ�����ٷ��䣬�������������㼸��������������
1. �������Ĵų�Ӧ�����г����ȶ���������Ӷ����ή��ͬ�����ٷ��������������������������������������Լ�������
2. ��������ͨ��������ʱ���ܵ��Ĵų�Ӧ���ӽ����㣬�����������Ĺ������ǰ��Ͳ�����̫��ĸı䡣���仰˵�������������뵽���֮��Ĵų�����ֵ(�����У����dz�֮Ϊ���ִų�[G・cm])Ӧ�þ����ܽӽ��㡣
Ϊ��������Щ�������������������һ��������ԭ�ͻ�(ͼ3)��
ͼ 3. ������ԭ�ͻ������ͼ��ʾ��ͼ
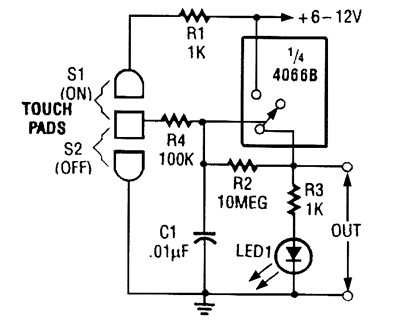
����������Ҫ����������������Dz��ò���ֱ��(DC)�ų��ķ�ʽ���ڿ�������NI��Ӳ����ϵͳ֮ǰ�����������ֹ����ɻ���̽ͷ����ά�˶�װ����ɵ�ֱ���ų�����ϵͳ��
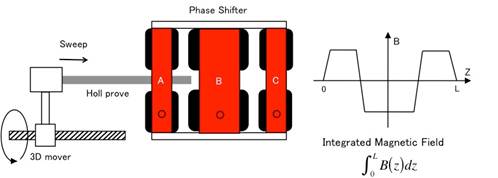
ͼ 4. ʹ�û���̽ͷ����ά�˶�װ�õ�ֱ�����ֲ���ϵͳ
����ϵͳ����ͨ����ά�˶�װ�û����ؽ�����̽ͷ�����������������ų��ֲ��������ƶ�����ִ�л��֡�������ˣ��Ⲣ����������������(1)����Ϊ����ϵͳֻ��ij��λ�ý�����ֵ�����������ų����ȶ������ظ��ԡ����⣬��������ϵͳ��ͨ���������ƶ�����̽ͷ�����������������������������ֱ���ų��ֲ�����Ҫ���Ѵ�Լ����Сʱ����ɲ������������¶�Ӱ��ĵ�Դ������豸������������(2)��˵�DZز����ٵġ���ˣ����ǿ����˷�λ��Ȧֱ�����ִų�����ϵͳ���Ӷ����ٵأ��߾��ȵز���ֱ�����ִų���
ͼ5��ʾ���ɷ�λ��Ȧִ��ֱ�����ִų�������ԭ��ͼ��
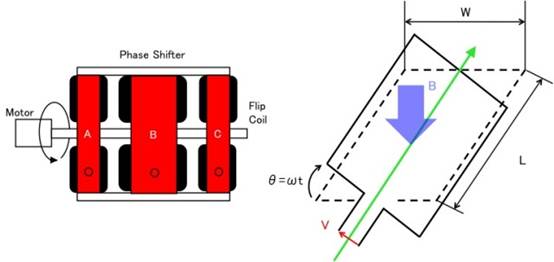
ͼ 5. ʹ�÷�λ��Ȧ����ֱ���ų�������ԭ��
��ͼ5��ʾ����һ����Ȧ(���� = N, ���� = L, ���� = W)��ֱ���ų�(B0)��ת��ʱ����Ȧ�ڻ������Ӧ��ѹ(V)�������з�����ʾ��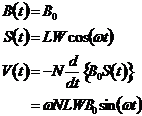
Furthermore, when the induction voltage is integrated by the rotation time, integral magnetic field (B0L) is solved by the following equation:
���⣬��ʹ��ת��ʱ��Ը�Ӧ��ѹ���л���ʱ�����ִų�(B0L)�������µķ�������⣺
Because this method performs the measurement within the flip coil rotation time, it is not affected by the temperature dependence in the power supplies and the measurement devices.
��Ϊ���ַ����ڷ�λ��Ȧת��ʱ����ִ�в��������Բ��ܶ��¶������ϴ�ĵ�Դ�����װ�õ�Ӱ�졣
ϵͳ����
��λ��Ȧֱ�����ִų�����ϵͳ������������Ҫ��
A. ������Ȧ������ʹ����г�ֵľ��ȣ��ȶ��ԣ��Լ��ظ��ԣ��Ӷ�����һ�������ܽӽ���Ļ��ִų�(����ֵ, 1 mA �����)��
B. ִ�����ݲɼ�ʱ���г�ֵľ��ȣ��Ӷ����Բ����ӽ�����Ļ��ִų�(����ֵ, 10 G cm �����)��
- �ڲ��������������ִų�����֮�����ͬ������ȷ���ԣ��Ӷ�����ͨ����ת��λ��Ȧ��������Ӧ��ѹ��
- �����û����������������Ӧ�Ŀ��Ƴ����������
�ۺϿ�����Щ��������ѡ����NI LabVIEWʵʱģ�� �� NI PXI ϵͳ��������λ��Ȧֱ�����ִų�����ϵͳ��
ϵͳ�ṹ
ͼ6��ʾ�˷�λ��Ȧֱ�����ִų�����ϵͳ�����ͼ���ͼ��
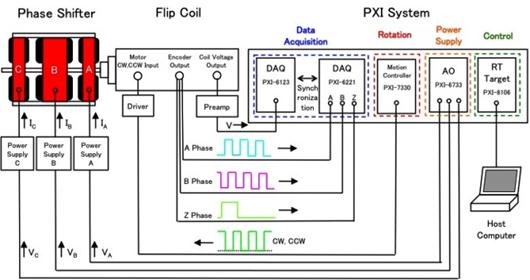
ͼ 6. ��λ��Ȧֱ�����ִų�����ϵͳ�����ͼ���ͼ
��λ��Ȧ����һ��600 mm �� 5 mm�IJ����־��ᣬ������10Ȧֱ��Ϊ0.2 mm��ͭ�ߡ�����ʹ��һ����������(Oriental Motor)��˾��RK566BE����������ת����Ȧ��ת��Ϊ180��/0.5�C1 s������ʹ��ŷķ����˾��E6B2-CWZ6C����ʽ��������������Ȧת���Ƕȡ�
����ʹ��NI PXI-6123ͬ������������ݲɼ�(DAQ)�豸��NI PXI-6221 ���Mϵ��DAQ�豸��NI PXI-6733 ���ٵ�ѹ���ģ�飬NI PXI-7330 �˶����������Լ� NI PXI-8106 Ƕ��ʽ��������������λ��Ȧ����ϵͳ������ʹ��LabVIEW Real-Time�д�����VI��������Щ�豸��
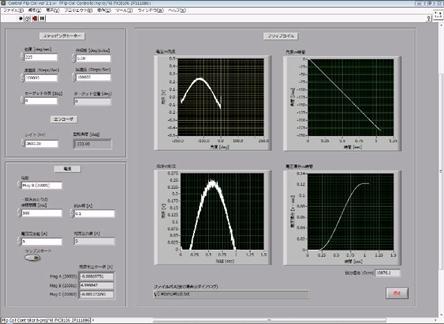
ͼ 7. ��λ��Ȧ������VI �����Ʒ�λ��Ȧ.vi����ǰ���
���ڿ��ƹ�����˵�����Ǵ�PXI-6733����һ���ⲿ�ο��źŸ���Դ����Դ�����ⲿ�ο��ź���Ӧ�ĵ������͵��������������������ĵ������䲨��Ӧ�ÿ�����ÿ��0.1 A���ڡ�����������ֱ����������ʱ���˶�������ת����λ��Ȧ��ͨ������DAQ�豸��ͬ��(20 MHz)��λ��Ȧת���Ƕ�(�����ź�)��������ֱ���ų�(��λ��Ȧ��Ӧ��ѹ)���������ݾͿ��Ա��ռ�����Ϊ��λ��Ȧ��Ӧ��ѹ����������ʹ�õ�������ǰ�÷Ŵ��������зŴ�����ʹ�÷���a �� b�������ĸ�Ӧ��ѹת���ɻ��ִų���ǰ�����漰�Ŀ��ƹ��̶���ʵʱ����ϵͳ(OS)��ִ�С�ͼ7��ʾ�˷�λ��Ȧ������VI �����Ʒ�λ��Ȧ.vi�� ��ǰ��塣
���
���Ƶ�����PXI-6733�������һ������Ϊ0.3 mV��ģ���źţ����ͨ������ģ���ź������Դ���ⲿ�ο��źŶˣ������������ĵ����Ϳ��Կ�����0.3 mA�ľ��ȡ������ͳ��ʵ��������A��
PXI-6123����һ��16λ��ģ��ת����(ADC)�������Բ�����СΪ��1.25 V�Ķ�̬��Χ�����������þ���Ϊ2.5 V/216=40 ��V��ʹ�ô�DAQģ���Լ�����Ϊ20dB�ĵ�����ǰ�÷Ŵ��������ǿ���ʵ��0.4 ��V (40 ��V/100)�ľ��ȡ�ͨ������b��0.4 ��V�ľ���ת��Ϊ���ִų����õ���ֵΪ2 G x cm������Ҳ�ͳ������������B�Ծ��ȵ�Ҫ��
��Ϊ��ѹ���ģ����DAQģ������ʹ������ͬ��ʱ������(20 MHz)�����ǿ��Խ��������ĵ�Դ����ִų�����ͬ����ʵ��50 ns�ľ�ȷ�ȡ����⣬��Ϊ���õ�PXI-8106����������ʵʱ����ϵͳ(OS)�����Ƴ��ᱻ�κ��ж����ӳ٣�ִ�е�ʱ��ȷ����Ϊ�뼶����һ��������������C��
ͨ��ʹ�� LabVIEW ͼ�λ��ı�����ڶ�ܣ����ǿ��Ժ����ش��������������Ӧ�Ŀ��Ƴ������磬���ǿ��Ժ�����ͨ��NI-DAQmx������������ʵ���˶�������������DAQģ��֮���ͬ�������⣬���ǿ���ʹ��LabVIEW�������ش�����ݲ��ο��Ƴ��Ӷ��ڵ���������������ʱ����ߺ㶨ʱ�����ĵ���ֵ����һ
����Ķ�:
- ...2015/01/29 14:35�����ڣ̣��֣ɣţ� ����������ϵͳ���о�
- ...2013/12/03 14:27������LK����ˮ������PLCϵͳ
- ...2013/01/04 16:30�����ڣ̣��֣ɣţ� �ģˣףУ�������Э�鴮��ͨ�ŵ�ʵ��
- ...2012/08/28 14:37������������Ƶ�� ����LabVIEW��NI USRP������Ƶ/ͨ���������о�
- ...2012/08/21 10:43������LabVIEW������Ӱ��ʾϵͳ
- ...2012/05/17 09:44������LM PLC���Ƶ�̫�����Զ�����ϵͳ
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������