�µ���GPS�źſ��ٲ����㷨
ժҪ�����źŻ����¿�����Ч��C��A�벶���㷨���ڸ�������GPS���ջ���ռ������Ҫ��λ��ͬʱҲ�Ǹ�������GPS���ջ�ʵ�û��Ĺؼ���ͨ���Բ����ź���ط�ֵ��ͳ�����Է������������Ͻ�ʾ����GPS�ź����ڲ���ĸ���ԭ�������˵�ǰ��Ҫ�������ۻ����������ס�ͨ����GPSϵͳ�͵������ĸ�ʽ�ķ���������������ۻ�������λ��Ԥ������������µ�GPS���źŲ����㷨�����۷����ͷ����������˱��㷨�Ŀ����ԣ��������SNRΪ-43 dBʱ�����ȶ��ز���GPS�źš�ʹ��ʵ�����ݲ��Ա��������㷨���������Ӳ�������������
�ؼ��ʣ�ȫ�����Ƕ�λϵͳ�����źŲ���֡ͬ���룻����ۻ�
0 ����
��ǰGPS��Ϊȫ�������ǵ���ϵͳ��Ӧ�÷�ΧԽ��Խ�㣬���������źŻ����µĽ��ռ����о����ܵ�������Ԯ��δ����������Ĵ̼��Ѿ���Ϊ�о��ȵ㡣���У��������Ƚ��ռ�����GPS���ջ��е�Ӧ�ã����ڲ��ܻ�����������������Ϊ�ܵ����ӡ��ڸ�������GPS���ջ��У����ڲ����㷨���ڻ��������Ľ�ǰ�ˣ���˸�Ч����GPS�źŲ����㷨����߸�������GPS���ջ����ܵĹؼ���ͨ�������źŻ����������ź�ǿ
�ȵ�Լ20��30 dB�������С��28 dB-Hz���ʱ���Ϊ���źţ���������GPS���ջ���Ҫͨ���źŴ����㷨����øߵ��źŴ������档���ķ�������Ҫ�ź��ۻ���������ȱ�㣬���������źŻ�����GPS�źż��ֵ�ĸ���ͳ�Ʒֲ����ԣ��ڴ˻����Ͻ�Ͽ�������ۻ��㷨�����������֡ͬ����Ϣ����GPS�źŲ����㷨����������������ԡ�ͨ��������֤��ʵ�����ݲ��ԣ�֤���㷨������Ч��
1 GPS�ź�ģ�ͼ�����
ʵ�ʵ�����ջ�����Ƶ�����ź��а�����L1��L2�ز���������Ϣ�������źŵ�C��A�벶���о��У�����P�뼰L2�ز����з������ɲ�����ʽ��

ʽ�У�Ϊ�źŷ�ֵ��D(·)Ϊ����λ��τΪ����λ�ӳ٣�C(·)ΪPRN�룻ηΪ�����ʶ����ձ仯�ʣ�τ0Ϊ�����źŵ�����λ�ӳ٣�ωmΪ�ز����Ƶ�ʣ�ωdΪ�ز�������Ƶ�ƣ�φ0Ϊ�ز���ʼ��λ��n(·)Ϊ��Ч����Ĵ��ް�������
���ջ����IJ������̣����յ�������Ƶ�źž����ز������C��A�������أ��ٽ�������ۻ��ͷ�����ۻ������һ����ֵV������ֵV����Ԥ���IJ�������ʱ�о�����ɹ������У��źž�������ۻ���I��Q֧·�ɱ�ʾΪ��

ʽ�У�aΪ�źŵķ�ֵ��τpΪ��������C��A�������C��A��֮�����λ�feΪ�����ز��뱾���ز�֮���Ƶ�ʲφeΪ���ز�֮�����λ�TcohΪ����ۻ�ʱ����nI��nQ�ֱ����I֧·��Q֧·�ϵ��������书��σn2Ϊ��
![]()
����������������ۻ�ʱ���ɷ��ȣ���һ�������ʾ�����źŲ����㷨�У�����ۻ����������ȵ�ԭ��
�����ϲ��������Ը����龯���ʺ��źż���ֵ���ʵķֲ���ϵ������������ϵIJ������ޣ�������ʵ�ʵ����źż���ֵ�ĸ��ʷֲ���ϵ�൱���ӣ����ʵ�ʵ��жԲ��������ٸ������۽������ã�����ͨ����Բ�����������ɲ����о���
���ݲ����ֵ��ͳ�����Կ�֪������GPS�źŻ����¸��ݵ��εIJ��������������о����������еĸ��ʷdz�������Զ�β���Ľ������ͳ�ƱȽϣ�������Բ����о��Ϳ��Կ˷����ֲ��㣬�Ӷ���߲����㷨���ܡ�
2 �ź��ۻ��㷨���ܷ���
����GPS�źŲ����㷨�У��ź��ۻ���������ߴ�������Ĺؼ�����ǰ����źŴ�������Ļ�������Ϊ�ź��ۻ��������ɷ�Ϊ���ࣺ����ۻ���������ۻ��Ͳ���ۻ������У��źž�����ۻ�������ȡ������Ч���ϼѣ���Ӧ���ܵ��������ݱ��ط�ת�����ƣ����ۻ��������������ݱ��ط�ת���ܻ������½���������ۻ��Ͳ���ۻ����������Ϊ�˿˷��ͼ�������Ӱ�죬���踶����ͬ�̶ȵ��������ʧ��Ϊ���ۣ�����ԭʼ�ź�Խ����ǵ��������ʧԽ�����ֻ��������ۻ����ʹ�á�Ŀǰ��GPS�źŵIJ����㷨�������ź��ۻ�����Ϊ�����������ز����㷨��ȫ���ز����㷨��ͨ���������ݱ������������г�����ۻ��IJ����㷨���Լ��ڶ����������ۻ����������ȽϵĻ������������ۻ����ּ�����ϵķ����ȣ���Щ�㷨�ĸĽ�����Ϊ����߶���GPS�źŵIJ������ܣ�ʹ��������GPS���ջ�ʵ�û���������ڴ˾����ӳ�����ۻ���ʱ�䣬�Ӷ��ϴ��ȵ�����źŵĴ������棬�����������GPS�źš�
2��1 �µĿ�������ۻ��㷨
ǰ���ᵽ������ۻ��㷨��ͨ���ǽ�ÿ1 ms�����������������ɵ������㣬�����ж��ٴ�����ۻ�������ж��ٴ�������㡣�������FFT�㷨������������������Ȼ�ܴ�����GPS�źŵIJ�������У�ͨ����Ҫ���г�ʱ�������ۻ����㣬������źŴ������棬���������������ᵽ�ķ������Ƚ��źŽ��е��ӣ��ٽ����������ķ���������������������ԭ�����£�
��֪�������ľ�����ʽ����Ϊ��
![]()
ʽ�У�Yn(k)Ϊ��n�ε����ֵ��yn(k)Ϊ��n������յ���ԭʼ��Ƶ���ݣ�x(k)Ϊ����C��A���뱾���ز�����ϣ���N������ۻ��ı�ʾʽΪ��
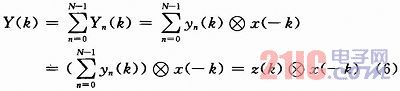
ʽ�У�z(k)ΪN���źŵ��ۻ����ɼ��������任�����N������ۻ�ֻ����1��������㣬���������ٽ�N����
Ϊ�˶Աȿ�������ۻ������ܣ�ʹ�������Ϊ-31 dB��GPS�������ݣ�����10 ms������ۻ���GPS�źŽ��в�����ͬһ�η������ݣ��ֱ�ʹ�ô�ͳ����ۻ��㷨�Ϳ�������ۻ��㷨������10�Σ���ͳ����ۻ��㷨ƽ����ʱ2��01 s����������ۻ�ƽ����ʱ0��11 s���ɴ˿ɼ�����������ۻ��㷨�IJ����ٶ�����������������ֱ���ͼ1��ͼ2��ʾ��
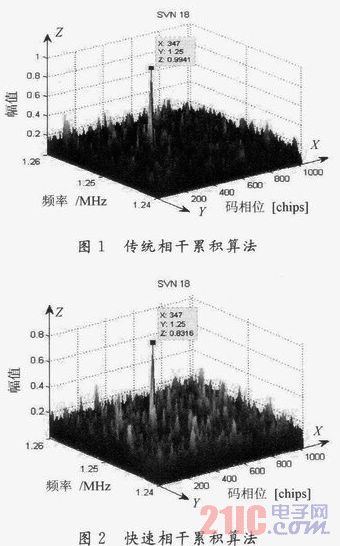
Ϊ�˱��ڱȽϿ�������ۻ��ʹ�ͳ����ۻ��㷨�IJ��죬ͼ1��ͼ2�еķ�ֵ���꣬���Դ�ͳ����ۻ��IJ����ֵ���й�һ��������
�����������������������£�������з���������ַ��������ȶ��ز����źţ��������鲶���ֵ���жԱȣ���ͳ����ۻ�30�β���������ط�ֵ�ľ�ֵΪ12��507×10-9����������ۻ��㷨�IJ����ֵΪ10��742×10-9������ڴ�ͳ����ۻ��㷨����������ۻ�����ط��ֵ�½���14��11�����ɼ�����������ۻ��㷨������������Խ��������������ٶȵ�ͬʱ���������е���ط�ֵ���н��ͣ����Ǹ��㷨Ϊ��ø�Ч�ʶ�������С���ۡ�
3 ���źŲ������
ͨ���Ե������ĵĸ�ʽ�ͱ�������������ȷ��ÿ6 s����һ�ε�֡ͬ����Ϣʼ��Ϊ10001011�����������֪�ľ���������������Ե�֡ͬ����Ϣ�������źŲ�����һ������ѡ�����巽�������ͼ3��ʾ��
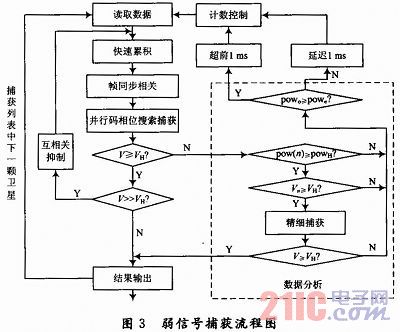
�㷨��ʹ������Բ���ĸ����ͨ���Զ����ط�ֵ�ıȽϣ���Ϊ�ֲ��������Դ��������Ƿ���������źţ��ٸ��ݴֲ���������С��Χ�ڵľ�ϸ����ͬʱ������������������ݱ��ط�ת���Ʒ���������֡ͬ������������ϣ��Ӷ�ʹ���ط�ת���ƾ��ȴ�Ϊ��ߣ���ʵ�ָ���ʱ�������ۻ�����ýϸߵ��źŴ������档�㷨ͻ�����ص��Dz�������жԲ�ͬǿ���źŲ��ò�ͬ�IJ������̣�ǿ�źſ���ֱ�Ӳ�����������ź�ͨ���ϳ�ʱ����ۻ�������źš�
���������������£�
(1)���ݶ�ȡ������Ƶ�������ݰ��̶���8����160 ms�ij��ȣ���ζ�ȡ��ÿ���ӳ�1 ms������λ��
(2)�����ۻ��������ݽ��н�����������ۻ������������Ϊ��ż���顣
(3)������㡣����(2)�������������ݷֱ��뱾��֡ͬ������л���������㡣
(4)�벢�в�����֡ͬ������غ�����ݽ����벢�в������㣬����Ѱ�ҽ������ݵ�C��A��������ز�Ƶ�㡣
(5)���ݷ������������ݱ��صķ�תλ�ã��ж�֡ͬ�����Ƿ���֡�
(6)�����о��������ǰ������IJ����ֵ�����������ޣ�������Ե�ǰ���ǵIJ�����������ȴ�֡ͬ����Ϣ���֣��ٱȽϲ����ֵ�Ƿ��������ޡ��粶��ʱ�䳬��6 s��������Ե�ǰ���ǵ�������
(7)�ӳٿ��ơ�Ĭ��������ݶ�ȡ��ʼλ�ñ��ϴ��ӳ�20 ms�������ݷ������Ƴ����ݱ��ط�תλ��ʱ������ݹ��ƽ�����Զ�ȡ���ݵ�λ����Ĭ��ֵ�Ͻ�������������ĵ�����
(8)��������ơ���ij�����ǵļ���źŷ�ֵԶԶ���ڲ�������ʱ������Ϊ�����ź��д�����ǿ�����źţ�Ϊ�˼��ٸ��ź��ڲ�������ж�������GPS�źŵ�Ӱ�죬�ڳɹ������ǿGPS
����Ķ�:
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������