FPGA��ֱ�����λ�ÿ����е�Ӧ��
������ֱ���������ϵͳ�У���������һ�㶼�ǵ����ת�٣����Ƶ�Ŀ���DZ��ֵ����ת��������Ҫ�Ķ�ֵ�ϡ�����ʵ�����������У��������������е�������������˶��ı��ֲ�һ������ת�٣�Ҳ������ʹ������е�����������һ����λ�ñ仯����ʱ��Ҫ�Ŀ������Ͳ����ǵ����ת�٣����ǿ��ƶ����ֱ��λ�ƣ�����轫�����ת�����ת��Ϊ�����λ�������
����1 ���λ�ÿ���ģ������
����1��1 ֱ�����λ�ÿ��Ƶķ���
�����ڴˣ�ʹ��maxonֱ�������ͨ�������������dz�����ʹű��������ܹ�ʵ�ִ�ת�ٵ�λ�Ƶ�ת�����乤��ԭ�����£����ת��ʱ����������ʼ����������壬���������Ƶ��������ת�ٳ����ȣ��ϸ߿ɴ�20 kHz�������ÿ��תһȦ�������������16���������壬ͨ������ó�ÿ�������������������ز���0��006 14 mm��λ�ơ������Ϳ���Ҫ���Ƶ�λ�����÷�������ĸ�������ʾ����ΪFPGA��λ�ÿ���ģ�����ֵ�������ת��ʱ��FPGA�еļ�������ѷ���������������棬λ�ÿ���ģ�鲻�϶�ȡ��������ļ���ֵ������λ�ÿ���ģ���еĸ���ֵ�Ƚϡ���������ȵ�ʱ��λ�ÿ���ģ�鷢��ֹͣ�źţ��Ӷ����Ƶ��ɲ�������ֹͣ�˶����ٶ�ȡ�������еļ���ֵ�������ֵ���Ƚϣ��������ֵ�������ֵ�ڿ��ƾ��ȷ�Χ�ڣ���˴ο��ƽ�����������ڷ�Χ�ڣ�����ֵ��Ϊ��һ�ο��Ƶĸ���ֵ���������Ƶ���˶���ֱ���ﵽҪ��ľ��ȷ�ΧΪֹ��
����1��2 λ�ÿ���ģ������
����λ�ÿ���ģ����3������ɣ��Ƚ�ģ�顢����ģ�����ʱģ�顣�Ƚ�ģ��������ǽ�������������������������������������Ƚϣ����������ʱ���������ֹͣ�źš�����ģ��������Ǹ�������Ŀ����źſ��Ƶ�����˶�����ʱģ��������Ƿ�ֹ��ʧ�������壬ȷ��ȷ���ر�����������������������������ص���ܸ���ģ��ľ���ʵ�֡�
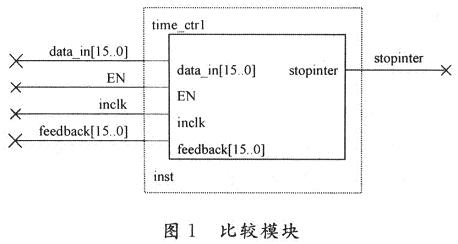
����1��2��1 �Ƚ�ģ��
����ͼ1�У�data_in[15����O]Ϊ�����ķ������������ENΪ�������ʹ���źţ�inclkΪ����ʱ�ӣ�feedback[15����0]Ϊ�������ʱ�������ļ���ֵ��stopinterΪ���ֹͣʱ��ģ���ڲ������źţ���O����ʾ��Ч����1����ʾ��Ч���Ƚ�ģ��Ĺ���ԭ�����£��Ƚ�ģ���ڽ��յ�����ֵ��Ҳ���Ǹ���Ҫ���Ƶ�λ������������ķ�������ĸ������������档�ڹ���ʱ�ӵ������£�ģ���ϵؼ��EN�ź��Ƿ���Ч�����EN�ź���Ч��ģ�齫��ʼ��ȡ��������ֵ���������ֵ���Ƚϣ������ȣ�ģ����Ϊ����������ص��˶�����ָ��λ�ã���ʱ�����stopinter�ź���Ч�����Ƶ��ɲ�������� stopinter�ź���Ч����������˶���
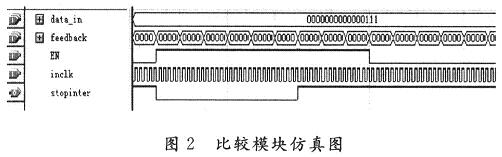
������ͼ2��ʾ����������ļ���ֵΪ7����ʹ���ź�EN��Чʱ��ģ�鿪ʼ���˿�feedback[15����O]�е�ֵ(�������ʱͨ���ű����������������������)����data_in[15����0]�и���������������Ƚϡ���������ȵ�ʱ��ʾ��������ĸ����˶�����ָ��λ�ã���ʱstopinter�ź���Ч����ʼ���Ƶ��ɲ����ֹͣ��
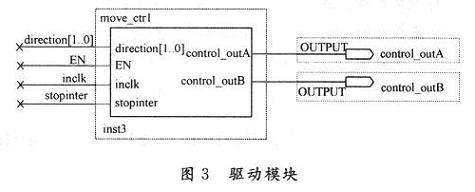
����1��2��2 ����ģ��
����ͼ3�У�derect[1����O]Ϊ����Ŀ��������źţ�ENΪ�������ʹ���źţ���0����ʾ��Ч����1����ʾ��Ч��inclkΪ����ʱ�ӣ� stopinterΪ���ֹͣ�źŵ�ģ���ڲ������źţ�control_outA��control_outBΪ���Ƶ��������źţ������������ź�ֱ�����ӵ��������оƬ������ģ��Ĺ���ԭ�����£�
�����ڹ���ʱ�ӵ������£�����ģ���ϵؼ��EN�źź�stopinter�ź��Ƿ���Ч�������EN��Ч������stopinter��Ч��ʱ��ģ������ controi_outA��cont-orl_outBȡ���ڵ�����������ź�derect[1����0]��״̬����derect[1����0]Ϊ��01�� ʱ��control_outA���Ϊ��0����control_outB���Ϊ��1������ʾ���Ƶ����ת����derect[1����0]Ϊ��10��ʱ�� control_outA���Ϊ��1����con-trol_outB���Ϊ��O������ʾ���Ƶ����ת����������ģ��һ����stop�ź���Ч�� control_outA��control_outB�������Ϊ��O������ʾ���Ƶ��ɲ����ֹͣ����EN��stop�źŶ���Ч��ʱ�� control_outA��con-trol_outB�������Ϊ��1������ʾ�Ե�������κο��ơ�
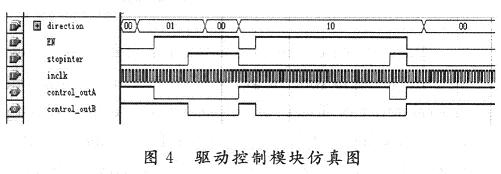
������ͼ4��ʾ����EN��stopinter�źŶ�Ϊ��0��ʱ��ģ������control_outA��contorl_outB��Ϊ��1�����Ե�������κο��ơ���EN�źű�Ϊ��1��ʱ����ʾ�����ʼ�˶���ģ������control_outAΪ��O����Contorl_outBΪ��1������direction [1����0]�е�ֵ��01����ͬ����ʱ�����ת����stopinter�źű�Ϊ��1��ʱ��ģ������control_outAΪ��O���� contorl_outBҲΪ��O������ʱ���ɲ����ֹͣ����EN�ź�Ϊ��1����stopinter�ź��ٴ�Ϊ��0��ʱ������ٴο�ʼ�˶���ģ������ control_outAΪ��1����con-torl_outBΪ��0������direction[1����O]�е�ֵ��10����ͬ����ʱ�����ת��
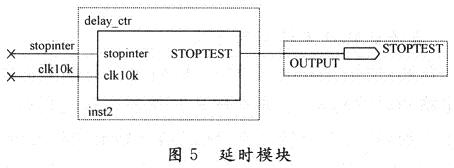
����1��2��3 ��ʱģ��
����ͼ4�У�ENΪ��ʱ��ʹ���źţ�Ҳ���Ǽ����Ƚ�ģ�������ź�stopinter��inclkΪ����ʱ�ӣ�stopΪ���ֹͣ�źŶ��ⲿ������źš���ʱģ��(��ͼ5��ʾ)�Ĺ���ԭ�����£�����ʱģ���stopinter�ź�Ϊ��1��ʱ��ģ���ڵļ�������ʼ������������ʱ�Ӽ�ģ��Ĺ���ʱ��10 kHz��������300��ģ������ź�Ϊ��1������ʱģ���stopinter�ź�Ϊ��0��ʱ��ģ���ڼ�������������ģ������ź�Ϊ��0����
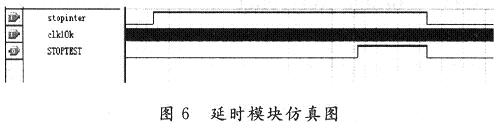
���������ɲ��ʱ�����ڴ��ڹ��ԣ������������ֹͣ������һ�λ��еĹ��̣�����������У������Ȼ��ͨ���ű��������ط������壬ֻ����Ϊ�����ת���½������������Ƶ�ʴ�͡���stopinter�źű�Ϊ��1��ʱ�������ʼɲ���������ʱ���̶�ȡfeedback[15����O]�˿��ϵķ���������ֵ�����������������ص�λ�ã���ô��Ȼ�ᶪʧ�����й����еķ������塣�����ͻᵼ�¶��صķ�����������ʵ�ʵ�����صķ�������������ȣ��Ӷ����ص�Ӱ����ƾ��ȣ����Ա�����stopinter�źű�Ϊ��1�����ӳ�һ��ʱ�䣬ȷ�����ֹͣ�������ٸ���STOPTEST�źţ���Ϊ��ȡ����������ֵ����Ч�źţ���ʱ�ö��صķ���������ֵ��������ص�ʵ��λ����ȷ�ġ�
����ͨ��ʵ�飬�ڵ���Խϸ�ת������ʱ���õ��ɲ��������������ץ����������IJ��Σ��ҳ���������Ƶ�ʿ�ʼͻȻ�½�ֱ������������ʧ���Ƕ�ʱ�䣬��������Ҫ����ʱ��ͨ����������ʵ�飬���Գ����ʱ��Ϊ30 ms�����ķ����������Ϊ20������˰�Ҫ���Ƶ�λ��������ɷ�������ĸ����������ֵ��ȥ20��Ϊ�Ƚ�ģ�����ֵ���Ϳ��Ե������й��������ӵ�20 �����塣�����Ե���Ŀ����ܹ��ﵽһ�ε�λ������Ҫ�����ٴε��ڡ���ʱģ�����ͼ��ͼ6��ʾ��
����2 �� ��
�����ֳ��ɱ��������(FPGA)�������С���ٶȿ졢���ɶȸߣ��ܹ���Ӳ����·��ʵ���㷨��ʹ��FPGA���Ƶ�����ܹ���֤���Ƶ�ʵʱ�ԺͿɿ��ԡ�����Ϊһ����Ч�����ֻ����Ʒ����ؽ��㷺��Ϊ���������ܺ�ʹ�á�
����Ķ�:
- ...2015/09/24 18:00��FPGA��Դ���
- ...2012/10/29 10:29�����ϸ�����������FPGA,ʵ�ֽϼ�WLAN����
- ...2012/10/22 13:14���˽�LabVIEW FPGA�����������Ƶ��������������
- ...2012/09/24 13:59��NI PXI���FPGAʵ�ֽϼ�WLAN������֧��802.11ac
- ...2012/09/17 14:04���˽�LabVIEW FPGA�����������Ƶ��������������
- ...2012/08/13 13:22��ʹ��LabVIEW��FPGA������һ���Զ���������������ϵͳ
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������