SmartRIO����CompactRIO�����ܳ�����ԭ�Ϳ���ƽ̨
����:��־�� - �廪��ѧ
��ҵ:����
��Ʒ:ԺУ��Ʒ, LabVIEW, CompactRIO
��ս:
��ν���ܳ���ָ����ʻ�����У������ܹ�����ʶ��·������������ת��ͳ��٣��Ӷ�����Զ���ʻ�������ܳ��Զ���ʻ�����㷨�Ŀ������Թ����У�����ս����ѡ��һ������ʵ�ֿ���ԭ�Ϳ�������Ӳ��ƽ̨�� ��Ӳ�����棬�����ܳ��Ŀ����У�����Ҫ���ʵʱ������Ϣ����ǰ���١���ص�ѹ��Ҫʵʱ�������ܳ����١�����ȿ��Ʋ����������Ҫ�зḻ��I/Oͨ��������Ҫ�������ܹ�ʵ�ָ��ٵ�ʵʱ�����㷨���������ڱ����ܳ�������ʹ��ͳһ������ģ��������ޣ�30cm��20cm��15cm��,��Ҫ�������ԭ�Ϳ���ƽ̨�ܹ����������ܳ�ģ֮�ڡ����������棬Ҫ��������Ӳ��ƽ̨�ܹ�������ӣ��ں�ǿ��������źŴ����Լ����Ƶ��㷨�����������Ѻã��Ա���ٵĿ������ԡ�
�������:
��������ԭ�Ϳ���ƽ̨����NI��˾CompactRIO��LabVIEWʵ�֡�CompactRIOΪ����FPGA���ܵĸ�ʵʱ��Ƕ��ʽϵͳ������ͬʱ���ö�鹦�ܷḻ��I/Oģ�顣�����㷨��LabVIEW��ʵ�֣�����������CompactRIO���С�
��ͨ��CompactRIO�����Է����Ч�ض����ܳ�ʹ�õĴ�������������·��Ӳ���豸���в��ԣ�Ҳ����ͨ��LabVIEW���������㷨���ص�CompactRIO�н���ʵ�����ԡ���
���ܳ�����
�ܽ������ߵȽ���˾ί�У��ߵ�ѧУ�Զ���רҵ��ѧָ��ίԱ�Ḻ������ȫ����ѧ�����ܳ������������������������������ȫ�������֮һ����2006��ٰ��˵�һ�����������ѡ��ʹ�ô�����ί��ͳһ�ṩ�ľ�����ģ�����÷�˼����16λ������MC9S12DG128 ��Ϊ���Ŀ��Ƶ�Ԫ��������˼���Ʒ�����ϵͳ��ƣ������������źŲɼ������������㷨�����������ת�������Ƶȡ����������ܳ���Ҫ����ʶ���ɫ�ذ��ϵĺ�ɫ·������������ת����������Ӷ���������Զ���ʻ����������֮�����������ֳ��ɹ������������ʱ��Ϊ����
����ԭ��
������Ҫ�����Freescale��S12ϵ�е�Ƭ�������õ�Ƭ������Ƕ��ʽϵͳʱ������Ч�ʵͣ��ɱ����Լ��������ڳ���ȱ�㣬Ϊ�����Ǿ������ÿ���ԭ�͵Ŀ�����������һ������Ϊ���壬�����ܳ�ԭ�еĿ��ƺ����滻ΪNI��˾��CompactRIO����ͨ������I/Oģ�����·��̽����������ٴ��������źŲɼ��Լ����������ת�������˶����ơ���LabVIEW��д�������п����㷨���������㷨���ص�CompactRIO�н���ԭ�����飬ȡ�ý��Ž��������ֲ��S12оƬ�С�
���ܳ��Ĺ���ģʽ��ͼ��ʾ�������紫����̽��������Ϣ��ת�ٴ�������ǰ���٣���ص�ѹ����·����ص�ѹ��������Щ��Ϣ������������д�����ͨ�������㷨���Գ�����ǰ״̬�����жϣ�����������ź�ʵ�ֶԶ��ת��͵���Ӽ��ٵĿ��ƣ��Ӷ���ɳ����������Զ���ʻ��
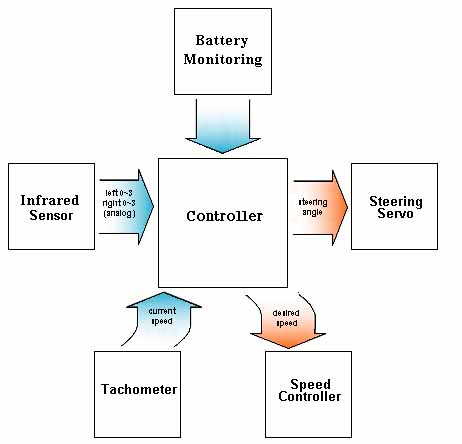
ͼ1���ܳ��Ĺ���ģʽ
��ͼ�⣩�����������Ϊ������Ϣ����ǰ���ٺ͵�ص�ѹ������������Щ��Ϣ������д�������������źſ���ת����������Ӷ�ʵ�ֳ����������Զ���ʻ��
��CompactRIO��Ϊ���������Ƕ��ʽϵͳ��ʵ�����ܳ��Ŀ���ԭ�Ρ�CompactRIO��4��I/Oģ�����ڲɼ����ܳ��������ź��Լ��������������ת������ִ���������⣬�����п��ƿ��ص�Ԫ�������˻������������ʵʱ��ʾ������Ϣ���������������������Ҫ������ͨ�����ߴ�����λ���У��Ӷ����ԶԿ����㷨���з������Ż����Ʋ��ԡ�
ƽ̨Ӳ������
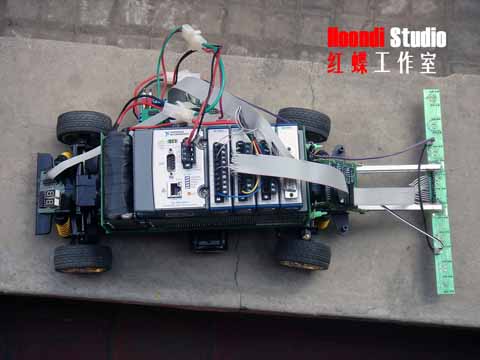
��ƽ̨��Ӳ��������Ҫ��5������ɣ��ֱ�Ϊ��ģ�ͳ����̡�������·��̽�������������̵��ת�ٴ��������������������ĸ�塢CompactRIOǶ��ʽ��������
���У������õ����ܳ������ǰ���1/10ȫ���ֱ����綯ң�غ���ģ�������ĵ��̣�������·��̽�����������15�Ժ��ⷢ����չܣ����ú��������Ϊ�˼�С�ɼ����Ӱ�죬���ϵͳ³���ԡ�
Ϊ��ȷ�������ܳ����˶�����Ҫ�������˶��ٶȡ�ת�ٴ������������١��ܳ�ģ��е�ṹ�����ƣ���������С����������ٶȴ��������������õ��Ƕ�����紫�����������ڵ��������ϼ�һ���̣����������ת���������̵�ת�����������ż����ͽ��ܹܷ����������࣬����ת��ʱ�����������ϵijݾ�������ܷ����Ĺ���ʱ�����谭���ߴ��������Խ��չ����˵ĵ�����кܴ�ı仯���������ڵ�·�У������������˵ĵ�ѹ�ͻ��кܴ�ı仯���ô������ɼ���ѹ���嵥λʱ���ڵĸ������ͻ��õ��ת�٣��Ӷ���ó��١�
CompactRIOǶ��ʽ������
ʵʱǶ��ʽ����������CompactRIO-9004����4��I/Oģ��۲���NI-9205��NI-9263��NI-9421�Լ�NI-9472���ֱ����ģ������������Լ��������������������幦�����£�
CompactRIO-9004������������Ҫͨ��TCP/IPЭ������λ������ͨѶ���Ӷ������Ƴ�����б�������أ���ʵʱϵͳ�����С����⣬������ͨ�������߽����������һЩ�����ϴ�����λ���У����з����ʹ�����
NI-9205��32·ģ�������룬����15·��Ϊ��紫�������ź����룬1·��Ϊ���ٴ��������롣
NI-9263��4·ģ���������1·��Ϊ�������PWM�����źţ�1·��Ϊ���PWM�����źš�
NI-9421��8·���������룬��Ϊ�������ƿ������ļ�⡣
NI-9472��8·�������������Ϊ�������ʾ�����źš�
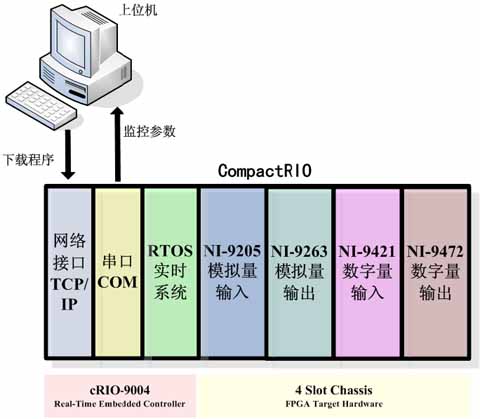
ͼ2 cRIODZ��ʽϵͳ���ͼ
��ͼ�⣩��cRIO�����Ƕ��ʽϵͳ����ɣ�����ģ��������������������������������
�������п����㷨
��ͼ�λ��������LabVIEW��д�˳������п����㷨�������㷨Ϊ����״̬�ķ������ƣ���������ͼ��ʾ��
ͼ3 ���ܳ������㷨��ͼ
��ͼ�⣩��ʼ��֮����һ������״̬�ķ������ƣ������㷨ͨ���Դ������źŽ��д���������ִ�������������ϼ�Сʵ��״̬������״̬֮�����
��������ز����ij�ʼ����Ȼ��ͨ������˿ڲɼ���·��Ϣ�ͳ�����Ϣ�����ݿ��Ʋ��Եó������˶�������״̬��ʵ��״̬���Ƚ�����״̬��ʵ��״̬�IJͨ��PID���ڼ�С�����ֵ��Ȼ��ͨ������˿ڸ��������źŶ����������ת�������п��ƣ��Ӷ�ʵ�ֳ�����ʻ�����еıջ����ơ�
Ϊ��ַ��ӿ��������ܣ������㷨�в��ֳ���������FPGA�ϣ����ֳ���������CompactRIO�ϡ�����Դ������źŵĶ�ȡ������Ͷ����������ƶ�����FPGA����ɵġ���PID���ڡ����Ʋ��Եõ�������״̬������CompactRIO�����еġ�
ʵ�����ݱ��������
����CompactRIO�нϴ�Ĵ洢�ռ䣬���ԶԳ������й��������в���������ȫ�ı��棬�ڳ���ֹͣ���������߽����洢�������ϴ�����λ�������ڽ��з�����ͨ��ͬ����������״̬�����Ϳ����źţ����ԶԿ����㷨���з������Ӷ�������ԵظĽ������㷨���ڽ϶̵�ʱ����ʵ�ֿ����㷨���Ż����Ϻ��ٽ��Ż�֮��Ŀ����㷨��ֲ����Ƭ���У�ʵ��ʵ���Ŀ�����

ͼ4 ���ݷ�������
��ͼ�⣩ʵ�������ʵ�������ϴ�����λ�����õ������������ݷ���ģ����Ծ�ϸ�۲��κ�ʱ�̵�Ŀ�������ʵ��״̬������������Ϊ�Ż������㷨�ṩ�˱���������ͼ�У�����������ͼ�еĺ�ɫ����ΪĿ���������ɫ����Ϊʵ�ʲ��������ҿ���ͨ���趨ʱ�����������ʼ�����ֹ������ϸ�۲�̵ܶ�ʱ����ڵIJ����仯�����
����
���Dz�����NI��˾ CompactRIO��Ϊ���ƺ��Ĵ��Ƕ��ʽ����ϵͳ��ʵ�������ܳ��Ŀ���ԭ�Ρ���LabVIEW��д�˿����㷨�������ܳ��Զ������㷨��������ƺ��Ż�������������ܳ��Ŀ���Ч�ʡ���2006���ȫ����ѧ�����������������У������Ŷ���112֧�������л��ȫ����һ���ĺóɼ���2007��Ĵ˱����У�������ȫ��300��֧�������л�õ������ĺóɼ�����Щ�ɼ���ȡ�ã������Dz����˿���ԭ�ο���ƽ̨���ܲ��ɷֵġ�
����Ķ�:
- ...2015/12/10 11:25������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����
- ...2011/09/16 09:02��CSMAЭ�������ߴ����������е�ʵ��
- ...2011/05/23 13:40��Small Area Photodiode in Normal TIA Configuration
- ...2011/05/23 13:40��Small Solution Size 1.8V Low Voltage Input Piezoelectric Power Supply
- ...2009/10/16 09:21��16���Ʒ��Zigbee Smart Energy��֤
- ...2009/09/28 11:44������SmartModule���״�Ƕ��ʽ��������Ӧ��
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������