���Ⲣ���������������ϵͳ��������� - ��һ����
���ߣ�Kedar Godbole���������� C2000 Ӧ�ò�Ʒ��
���ֿ���ϵͳ�ܹ�Ϊ�����Ա�ṩ�������ƣ��������ʵʩ���㷨���ܡ��ɱ����������ܸ��ȶ��ȡ����ֿ�����������ģ������д��ڵ�Ư�ơ������������Լ�����ϻ������⡣��������������ϵͳʱ��Ҫ���ǵ���Ҫ�����������ʵʩѡ����ʵĴ�������ͬʱ�������ֳ�Ҳ������Ҫ�������Ա��Ҫ��ע���㴦������������ʾ�������������������⡣��Щ���ή�Ϳ���ϵͳ�����ܣ�ʹ�����Ա���ϴ��ȵط��ӳ����㷨�����ơ�
ͼ 1��ͨ���������ϵͳ
ͼ 1 ��ͨ�������������ϵͳ�Ľṹ��ͼ���㷨�������ֿ�������ʵʩ�����ֿ��������ɵĿ��������ͨ����������������������ѹ�����ȷ����ź�ͨ��ģ��ת���� (ADC) ���������㷨��
����ЧӦ�������
�����ź������ʾ���ź��������ʵ�����е��ź��ڷ��Ⱥ�ʱ�����������ģ����źŵ����ֱ�ʾ�����������ڲ���ʱ���ϲ�������Ҳ����˵���ڲ��������ű���������£������źŵı�ʾ������ʵֵ��ͬ����ȴͨ�����Խ��ܡ�ͼ (1) ��ʾ��ϵͳ�в�ͬ������Դ (quantization source)���Ƚ����Ե�����Դ�ǣ������������������������뱣��������Ե� ADC�����н�λ�����롢���������Եļ������棬����ʱ������ PWM ���ɹ��ܵ����������������� (PWM) �����������ǽ��ڱ��ĵ�������������ϸ����������������Դ��
ADC ����
�������в����źŶ��ԣ�����ϵͳ�źŵ���ʵֵ�� ADC ��������������ֵ֮��IJ�ֵ��Ϊϵͳ�IJ�������Ҫ��ͨ��ʹ�ø����ֳ��� ADC ����С��������ͨ����Ƕ��ʽ�������в��� 12 λ ��ADC ���������������ڽ��п��ز���ʱ����ʵʱ���IJ�ȷ���Ի���ɿ��������ȶ�������ͨ��������ʱ����� PWM �������ϵķ������������������������ھ��н�С���������IJ����С��� ADC ������ʹ��Ӳ������������������������������Ķ�������
�ر�Ҫע����ǶԶ����������ֵ˳�����ʱ�������ͨ������£������Աϣ����ʱ�õ����������ij���ض�ʱ���ġ�˲̬ͼ�������ʹ�õ��� ADC �����ɵ�������˳�������������������ʹ�þ���˫�����ͱ��ֵ�·����ͬʱ��˫ͨ�����в������� ADC ����ʹ��������С������һ�����Դ��������� ADC ������źż�����������źŸ��š�������Ƶĵ�·�������ڽ��Ϳ��ܵ��������������������ѹ���ŵĵ�����ֵ��
ͼ 2�������������ϵͳ
�㷨�����е�������ϵͳ������Σ�
�㷨����ֵ��ʾ������ЧӦ�Ϲؼ��ĵط����㷨��ʾ�ľ������ֳ����������ƹ����о���ѧ�����о����ֳ���ѡ��Կ���ϵͳ���ܵ�Ӱ�죬Ȼ���ڽ�����Ӧ�����ض�ϵͳʱ�����������ش����⡣ʵ���ϣ��������� AC ��Ӧ�����еĴų�������� (FOC) �ȸ����������ϵͳ���ԣ�����ЧӦ����ͨ�������ó���ԭ�����������ַ���ϵͳ����ϡ������ԡ����ӺͶ����������ġ���Σ�����ÿ��ϵͳ�����ж��ص���ƣ���˵�һ�ı����������������ȫ���������������������ֵ��ʾ���������������һ��ʵ�ö���Ч�İ취�ǣ�ͨ�����漰ʵ��������о�ʵ�ʵ����ֿ������Ϳ��Ʒ�����
ͼ 3����ѡ��ȽϷ����ĸ���
������� AC ��Ӧ���������ֱ�Ӵų�������� (FOC) ϵͳ��ʾ����������Ӱ�졣ͼ 3 ��ʾ��ϵͳ��Ӧ���ڷ�������ʵӦ���У����䱸�ʵ��������������������㷨���� 16 λ���㡢32 λ���㼰 32 λ IEEE-754 �����ȸ������ֲ�ͬ��ʽ�������ָ�ʽ�����û��� 32 λ���������źŴ������� (DSP) �ĵ������� (TI) �� TMS320F2812 �����źſ������� TI ��� 32 λ�����̵ġ�IQmath���⡣��IQmath ��ʹ�����Ա�ܹ�����ݵؽ��Ը����ʽ��д�� C ���Դ���ת��Ϊ 32 λ�����ʽ��������ȫ�� C ���Ա�д�������С�IQMath�����ṩ����ѧ������
����ϵͳ�ܹ��� 16 λ���㡢32 λ���㼰 IEEE754 �����ȸ������ָ�ʽ��ʾ��������ʾ�Ľ�������һ��ѡ���������ڶ��㴦�����ϵĸ���������ͨ������ʱ��֧�ֿ� (rts2800_ml.lib) ��ʵ�ֵģ�����Ч�ʲ��ߣ����Ը���汾��ʵʩ��Ҫ�ϳ��IJ���ʱ�� (4 kHz) �Ա�������и���ģ�顣���ڲ�ͬ�IJ���ʱ�佫Ӱ��ϵͳ���ܣ�����Ϊ�˱��ڱȽϣ�ʵ������ֻ������ 16 λ�� 32 λ֮��Ķ���汾��
Ҫ�Ƚ��������ݸ�ʽ����ֵ���ȵ�Ӱ�죬��Ҫ��ع����ٶ���Ӧ����Ӧ�� d �� q ��ο������������е� PI ���桢��������������ȫ���������ݸ�ʽ�ķ���������趨Ϊ��ͬ����Чֵ����ͼ 4 ���Կ�����16 λ����汾�븡��汾�����ܾ��м���IJ��
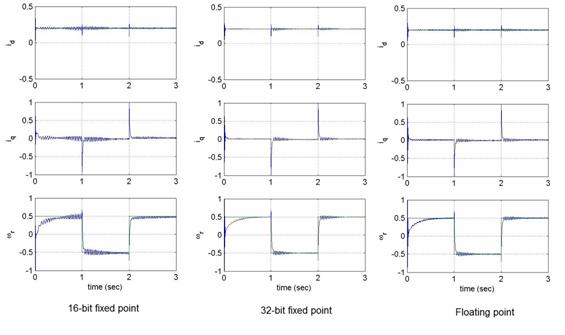
ͼ 4��16 λ���㡢32 λ���㼰�����������
��ͼ����ֵ���ܵıȽϿ��Կ�����16 λ����ϵͳ�����ɸ�α˲̬ (false transient) �����壬�� 32 λϵͳ��û����Щ����32 λ�����ȸ����� 32 λ����Ľ���dz������
����ʵϵͳ�У���Щ˲̬���������������������������Ӷ������������������䲻�������ڵ�һ���ٶȼ���ʱ���ֵĹ����ٶ���˲̬��˥���Լ�����������ͼ����ʾ�˴ι۲�ֵʮ�ֽӽ� 16 λϵͳ�ı�Եֵ����һ���棬���п�����Ӧ�� 32 λ�������ϵͳ���������á�
�������һ��ᷢ����ͨ�������㷨����һϵ�еļӡ���������ʱ��ͨ�������㷨������ʵ�ʹ����е����������ͨ���ɴﵽ���������Ŀ�ġ���ʹ�ö���ı�Ե��ǩ����λ (margins labeled guard bit) ����ɡ������㷨һ���ڱ�ôϵͳ (per-unit system) �н��б����Ա㰴������������������������ѹ��������Ť�ء��ٶȼ���ͨ���ȣ���ʹ�ú��ʵ����ű��������������һ�������Դ���������������ֵ���㷶�������ˡ����������Լ����ǡ�ָ����ƽ�����Ȳ����ѧ������
���ĵĵ� 2 ���ֽ����� 16 λ�� 32 λ����ϵͳʵ�ʵ�ʵʩ��������⣬������������ЧӦ�����ֿ�������������֮��Ĺ�ϵ��������Ӱ�졣�Ϻ����ǽ������µ�ĩβ����ظ������ܽᣬ���а����ܽ� PWM ������������ЧӦ�Լ������һ������¼���������Ķ�:
- ...2011/05/27 09:57�����Ⲣ���������������ϵͳ��������� - �ڶ�����
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������