����TMS320X2812�ĸ߾���ת�Dz���ϵͳ���
����1 ����
�����߾�����ת�Dz����㷺Ӧ���ھ��ܼӹ������պ���;��µ��������ǶȺͽ�λ�Ƶķ����У�ˮ��ʽ����ǣ�Բ��դ�Լ�����Ӧ��ʽ�����ʽ������ʽ��������ʽ������ʽ�Ƚ�λ�ƴ�������Ŀǰ������Բ��դ����ʵ�ֵĸ߾�����ת�Dz���ϵͳ����ṹ���������㣬�������ȸߵ��ص���õ��㷺Ӧ�á��������һ�ֻ���Բ��դ�ķǽӴ�ʽ��ת��λ�Ʋ���ϵͳ��ƣ��������һ��DSP������TMS320X 2812�������ݴ��������ƣ�ʹ�ý�λ�ƵIJ���ϵͳ���нṹ�������ȸߣ�����С����Ӧ�죬������Χ�㣬�����ܻ������ܵ�Ÿ��ŵ��ص㡣
����2 ϵͳ�ṹ������ԭ��
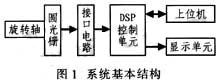
����ͼ 1��������TMS320X2812��DSP����ת���λ�Ʋ���ϵͳ�����ṹ����Ҫ����Բ��դ����������ӿڵ�·��DSP���Ƶ�Ԫ����ʾ��Ԫ�ȡ�Բ��դ�вⱻ������ת��λ�Ƶı仯���ٽ���λ�Ʊ仯ת��Ϊ����仯�����ӿڵ�·��Բ��դ������������崫�͵�TMS320X2812��DSP���������������· (QEP)ģ����в������㣬��ֱ��ͨ��LCD������ʾ������������ɽ�������������λ�����ͨ�ţ���ͨ��DSP����Ŀ����ź������Ʊ��������ת��λ�ơ�
����2.1 Բ��դ�ṹ������ԭ��
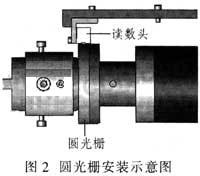
����ͼ 2�������͵�Բ��դ�������ɹ�դ��(����դ)�Ͷ���ͷ(ָʾ��դ)��ɡ���դ�������ͷ������γ�Ī�����ƣ���դÿ�ƶ�1��դ�࣬Ī�����ƾ��ƶ�1�����Ƽ������դ�ı��˶�����Ī������Ҳ��֮�ı��˶������߾��ж�Ӧ���˶���ϵ��ͨ������Ī�����Ƶ�λ�ƿɻ�ȡ��߹�դ��λ�������ƶ�����
������������դ�������դ�ļн�θ�dz�С�����Ī�����Ʒ���Ϊ��
����B=ω��θ (1)
����ʽ�У�BΪĪ�����Ƽ�ࣻωΪ��դ������
�����������ƶ���ĿN�������դ�ƶ����룺
����S=Nω (2)
���������դ���İ뾶Ϊr��������ת�ĽǶ�Ϊ��
����β=s��r=NBθ��r (3)
���������Ϳ�ͨ�������������ͨ�����ת���Ƕȡ�
������ϵͳ����������20μmԲ��դ����֮����RGH20Xϵ�ж���ͷ������ơ�Ϊ����߾��ȣ�����ͷ�ڲ��Թ�դ5ϸ��(�ֱ���Ϊ4μm)������������������������ֶԹ�դ����4��ϸ�֡�RESRԲ��դ����ֱ�ӿ���Բ���������(դ��20μm)��RGH20ϵ�ж���ͷ���������ܵĶ�һ���Ĺ�ѧ�˲�ϵͳ��ƣ���������Ⱦ�����ۡ�ָ������¶�������������ͨ���ľ�ȷ������ò�����
����2.2 DSP����Χ��·
�����ò���ϵͳ��Ӳ���������TMS320X2812��DSPΪ���ƺ��ĵġ�TMS320X2812Ϊ32λ����DSP����ϸߵ���ƵΪ150MHz����Сָ������Ϊ6.67 ns���ⲿ���õ�Ƶʱ�ӣ�ͨ��Ƭ�������Ƶ��TMS320X2812�ڲ��¼�������(EV)ģ���QEP��Ԫ��ֱ�Ӷ����������ź����룬�ɷ��㡢��ȷ�ض�Բ��դ����źŽ������ݲɼ���TMS320X2812�Ĵ���ͨ�Žӿ�(SCI)��һ��˫��ͨ���첽����ͨ�Žӿڣ�Ϊ���ٴ���ͨ��ʱCPU�Ŀ������䴮��֧��16�����պͷ���FIFO���ý������ͷ���������˫�������������и��Զ����Ŀ���λ���ж�λ��SCI����Ӳ�����ͨ�����ݼ��Ժ����ݸ�ʽ���ɼ�������������
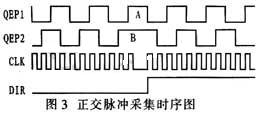
����2.2.1 ����DSP�����ݲɼ�
����Բ��դ����ͷ����ź�Ϊ����Ƶ�ʱ仯������(����λ���90°)������(A��B)��ͼ3��ʾ�����������������ź����뵽TMS320X2812��QEP1�� QEP2�������ţ�EVģ����QEP��·���������ɸ���A��B�������λ��ϵ����һ�������ź���Ϊͨ�ö�ʱ���ķ������롣���QEP1��ǰ����ʱ��������������֮��ʱ���ݼ�������QEP��·������������������������غ��½��ؼ�������˲�����ʱ��Ƶ����ÿ���������е�4�������Ѹ�ʱ����Ϊͨ�ö�λ��2 ������ʱ�ӣ�������ͨ��QEP������Ĺ�դ�ź�4ϸ�֡�ͨ�ö�ʱ��2���Ǵӵ�ǰֵ��ʼ��������˿���ʹ��QEPǰ������ֵװ�ص���ѡͨ�ö�ʱ���ļ������У���ʱ����ֵ����4�ó�����ͷ��������������Ӷ�����Ƕȡ�QEP��·�������������4ϸ�֣���ʹ��������ı�����λ�ƾ�ȷ��1μm��
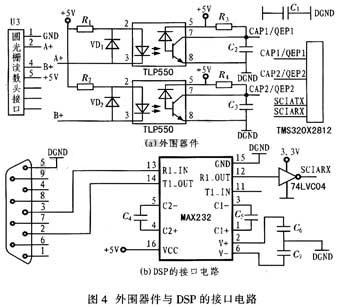
����2.2.2 �ӿڵ�·���
����RGH20 ����ͷ����źž��������ֱ���͵�QEP��Ԫ���š����У���������������TLP550���ٹ������ʵ�ֵ�Դ��صĸ��롣����ͨ�Žӿڵ�·���÷��� RS-232������������MAX232����ͨ�š�����MAX232�ĵ�Դ��ѹΪ+5V����DSP�ĵ�Դ��ѹΪ3.3 V��������MAX232��TMS320X2812��ӵ�ƽת������74LVC04����ͼ4��ʾ��
����3 ϵͳ�������
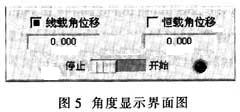
������λ����̲�������������������ƽ̨LabWindows��CVI������ͨ������������ϵͳ������Ӳ������λ���Ľ���ʵ�ֺͽϾ��õķ�ʽ��LabWindows��CVI�ṩ��ʵ�ִ���ͨ�ŵ�ר�ź����⡣��ϵͳ�Dz���SCI�ӿ���RS232����ʵ��DSP��PC��֮�������ͨ�ţ���λ���ɸ�����ʾ��ĽǶȱ仯��ͼ5�����Ƕ���ʾ���档
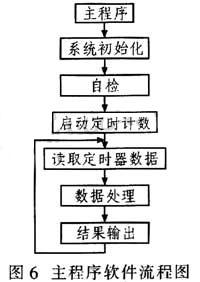
������ϵͳ����λ�������������C���Ա�̣�����ģ�黯��ƣ��������ڹ�����չ��Ӧ�䡣ͼ6�������������������̡����У���ʼ���ӳ�����Ҫ������ϵͳʱ�ӳ�ʼ�����˿ڳ�ʼ�����ж����õȣ��Լ��ӳ�������ʵ��ϵͳ�ij�ʼУ���Ͷ�ʱ����ʼ�������ݴ����ӳ����У���DSP��ͨ�ö�ʱ��2�ļ�����ֵ���з�����������������Եõ���Ӧ�Ľ�λ��ֵ���������ӳ�������ʵ�ֽ�λ��ֵ����ʾ����ؼ��Ǹ�����ֵ��ת�������ӳ����ͨ�����ڽ���λ�����ݴ��䵽��λ����ʾ�ʹ洢��
�������¸���QEP��·�ij�ʼ����̴��룺
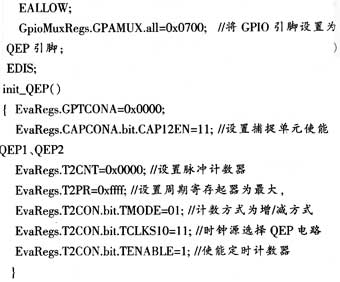
����4 ����
������ϵͳ��Ʋ�����������Բ��դ������ʵ���˽�λ�ƵķǽӴ��߾��Ȳ��������һ����а�װ�����Է��㣬�������ȸߣ�����������ǿ���ŵ㡣�ò���ϵͳ���� DSP��QEP��Ԫ��Բ��դ����ͷ����źŽ���4ϸ�ּ�������һ������˲��Ծ��ȣ�����λ�ƴ�1μm��TMS320X2812��DSP��ϵͳ��ʵ�ֲ������ݵIJɼ�����������ʾ������λ�����ͨ�ţ������ݲ�������Զ����Ʊ�����ת��Ľ�λ�ƣ���˸ò���ϵͳ�������ܻ��ص㣬��������ij��Ʒ����ϵͳ�������ڲ��ԡ���ҵ�;��µ������и��߹㷺��Ӧ��ǰ����
����Ķ�:
- ...2015/02/12 15:18������TCN�ĸ����г������ſ���ϵͳ���
- ...2012/04/09 17:23�����ڣԣ���ģ�͵ķ����ԣΣãӴ��������������
- ...2012/04/09 16:08�����ڣԪ���ģ����Ƿ������е�۵�ƽ�����
- ...2012/03/27 16:24�����ڣԣ�ģ������ģ�͵ĺ�������̬����
- ...2012/03/13 15:55�����ڣԣ�������컬ģ³����������Ƽ�Ӧ��
- ...2011/12/02 16:57������TMS320LF2407����Ȼ������������ϵͳ���
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����

- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������